 Magnetic Wheeled Crawler with Oscillating Brush Head
Magnetic Wheeled Crawler with Oscillating Brush HeadUsed for Remotely Controlled Container Cleanout (see below)
 Close-up of Brush Head
Close-up of Brush Head
 Magnetic Wheeled Crawler Shown Inside Container and Glovebox Line
Magnetic Wheeled Crawler Shown Inside Container and Glovebox Line Lab Testing of Magnetic Wheeled Crawler
Lab Testing of Magnetic Wheeled Crawler First Version of the Magnetic Wheeled Crawler
First Version of the Magnetic Wheeled Crawler Glass Crushing Machine
Glass Crushing MachineFor size reduction of Rad contaminated glass jars in preparation for disposal
 Glass Crushing Machine in Glovebox Location
Glass Crushing Machine in Glovebox Location Robotic System for USDA Automated Food Contamination Analysis
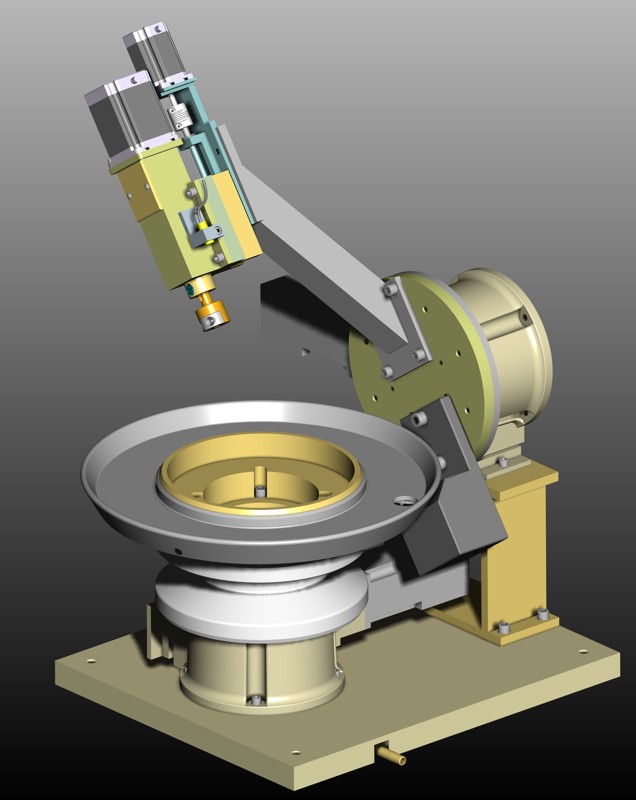
Robotic System for USDA Automated Food Contamination Analysis Robotic Lathe System in Glovebox
Robotic Lathe System in GloveboxI designed various subsystems such as Pallet Carousel, Custom Workholding Chucks, Quick-Change Chuck System, Millhead Swingarm, and Cyclone Separator. See Below.
 Lab Testing of Pallet Carousel
Lab Testing of Pallet CarouselFor robotic storage of up to 16 spindle mounted chucks and tools
 Cyclone Separator and Modified Nilfisk Vacuum Unit
Cyclone Separator and Modified Nilfisk Vacuum UnitUsed for the vacuum collection of machining chips. Chips are deposited in the Cyclone's cup before reaching the Nilfisk vacuum unit.
 Millhead Swingarm
Millhead SwingarmUsed for manual placement of the Millhead on to the toolpost
 Lab Testing of Millhead Swingarm
Lab Testing of Millhead Swingarm Tailstock Retrofit for Precitech Lathe
Tailstock Retrofit for Precitech Lathe Tailstock Shown Mounted on Precitech Lathe
Tailstock Shown Mounted on Precitech Lathe Positioning Device for Eddy Current Probe
Positioning Device for Eddy Current ProbeUsed for Automated Weld Inspection
 Custom 3 Axis Machine
Custom 3 Axis Machine Sample Stacker Tool
Sample Stacker ToolUsed for gluing layers of cylindrical samples
 Double-Lock Lockout Device
Double-Lock Lockout DeviceUsed to control access to glovebox
 Lockout Device shown mounted to Airlock Door
Lockout Device shown mounted to Airlock Door Staubli Robot Work Cell
Staubli Robot Work CellUsed for development of automation devices
I setup the work cell and programmed the robot
 Automated Density Measuring System
Automated Density Measuring System National Ignition Facility (NIF)
National Ignition Facility (NIF)Conceptualization of robotic cleaning system for NIF target chamber
 Robotic cleaning system shown inside NIF target chamber
Robotic cleaning system shown inside NIF target chamber